Robots hebben moeite met het uitvoeren van handelingen met objecten die ze niet eerder gezien hebben. Onderzoekers van het MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) hebben nu een robot ontworpen die dat wél kan. MIT CSAIL publiceerde er een paper en een artikel over.
Mok ophangen niet simpel
Om een mok op te pakken aan een haak te hangen moet een vrij precieze reeks acties uitgevoerd worden. Als we dit zelf doen staan we er niet bij stil hoeveel beslissingen en acties er eigenlijk aan ten grondslag liggen. Je moet de mok eerst zien. Daarna moet je het handvat lokaliseren en je beseffen dat je het handvat moet gebruiken om de beker op te tillen.
Vervolgens moet je de juiste combinatie van kracht en vingers bepalen, de mok optillen en de haak zien waaraan je de mok op gaat hangen. Je moet bepalen of de haak nog vrij is en de mok aan de beker plaatsen. Een mok ophangen is dus nog niet zo eenvoudig.
Moeilijk
En dat hebben onderzoekers ook gemerkt. In het artikel wordt beschreven dat eerdere robots wel een mok konden ophangen aan een rek als deze exact hetzelfde was als een andere mok (die de robot al eerder gezien had), maar dat het bij een bonte verzameling mokken van verschillende kleuren en maten gegarandeerd mis ging.
Met een serie schoenen ondervonden robots die alle voorwerpen niet eerder gezien hadden overigens hetzelfde. De nieuwe robot van MIT CSAIL is dan ook niet alleen vaardig met mokken, maar kan ook schoenen in alle soorten en maten (van herenschoenen tot kinderschoentjes en laarzen) in een rek plaatsen, zonder deze eerst gezien te hebben.

foto: MIT
‘Visuele routekaart’
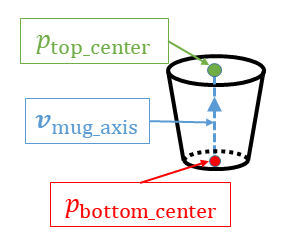
Om de robot te leren om alle verschillende soorten mokken en schoenen op te bergen hebben de onderzoekers iets nieuws bedacht. Ze leerden de objecten te zien als verzamelingen van ‘3D-keypoints’. Deze ‘keypoints’ voorzien de robot van alle informatie om te kunnen bepalen wat het moet doen met het voorwerp. Het biedt de robot als het ware een visuele routekaart.
In het geval van de mok zijn er 3 keypoints nodig om alle verschillende mokken te kunnen ophangen aan het rek. Bij de schoenen gaat het om slecht 6 keypoints. Met de 6 keypoints kan de robot alle schoenen opruimen, van slippers tot laarzen.
afbeelding: MIT
De onderzoekers noemen hun aanpak ‘KPAM’, wat staat voor Keypoint Affordance Manipulation. Het onderzoek bouwt voort op een eerder project dat robots in staat stelde om objecten te manipuleren met keypoints.
KPAM versus ‘pose-based’ en algemene grijpalgoritmen
Tot nu toe waren de twee meest voorkomende benaderingen voor het oppakken van voorwerpen de op positie gebaseerde systemen (die de positie en oriëntatie van een voorwerp schatten) en algemene grijpalgoritmen, die op geometrie gebaseerd zijn.
Deze methoden werkten niet altijd goed in de praktijk. De op positie gebaseerde systemen kunnen vaak niet omgaan met objecten met significant verschillende vormen. De grijpalgoritmen hebben